Schneckengetriebe, bestehend aus Schnecke und Schneckenrad, ermöglichen das Übertragen großer Lasten bei einem hohen Übersetzungsverhältnis.
Funktionsweise
Eine Sonderbauform des Zahnrades stellt die sogenannte Schnecke dar. Bei dieser windet sich der Zahn um den Schneckenschaft wie das Gewinde einer Schraube. Das Gegenrad zur Schnecke bildet das Schneckenrad. Ein solches Getriebe, bestehend aus Schnecke und Schneckenrad, wird allgemein als Schneckengetriebe bezeichnet.
Die Schnecke kann als Sonderfall eines schrägverzahnten Stirnrades betrachtet werden. Man stelle sich dabei vor, an einem Stirnrad befände sich lediglich ein Zahn. Nun vergrößere man den Schrägungswinkel so sehr, dass sich der Zahn mehrmals um das Stirnrad windet, bevor dieser auf der gegenüberliegenden Stirnseite wieder austritt. Als Ergebnis erhielte man dann letztlich eine „einzahnige“ Schnecke.
Man könne sich nun vorstellen, dass man anstelle des einen Zahnes auch zwei oder mehrere Zähne gleichzeitig um das Stirnrad winde. Dies entspräche dann einer „zweizahnigen“ Schnecke bzw. „mehrzahnigen“ Schnecke.
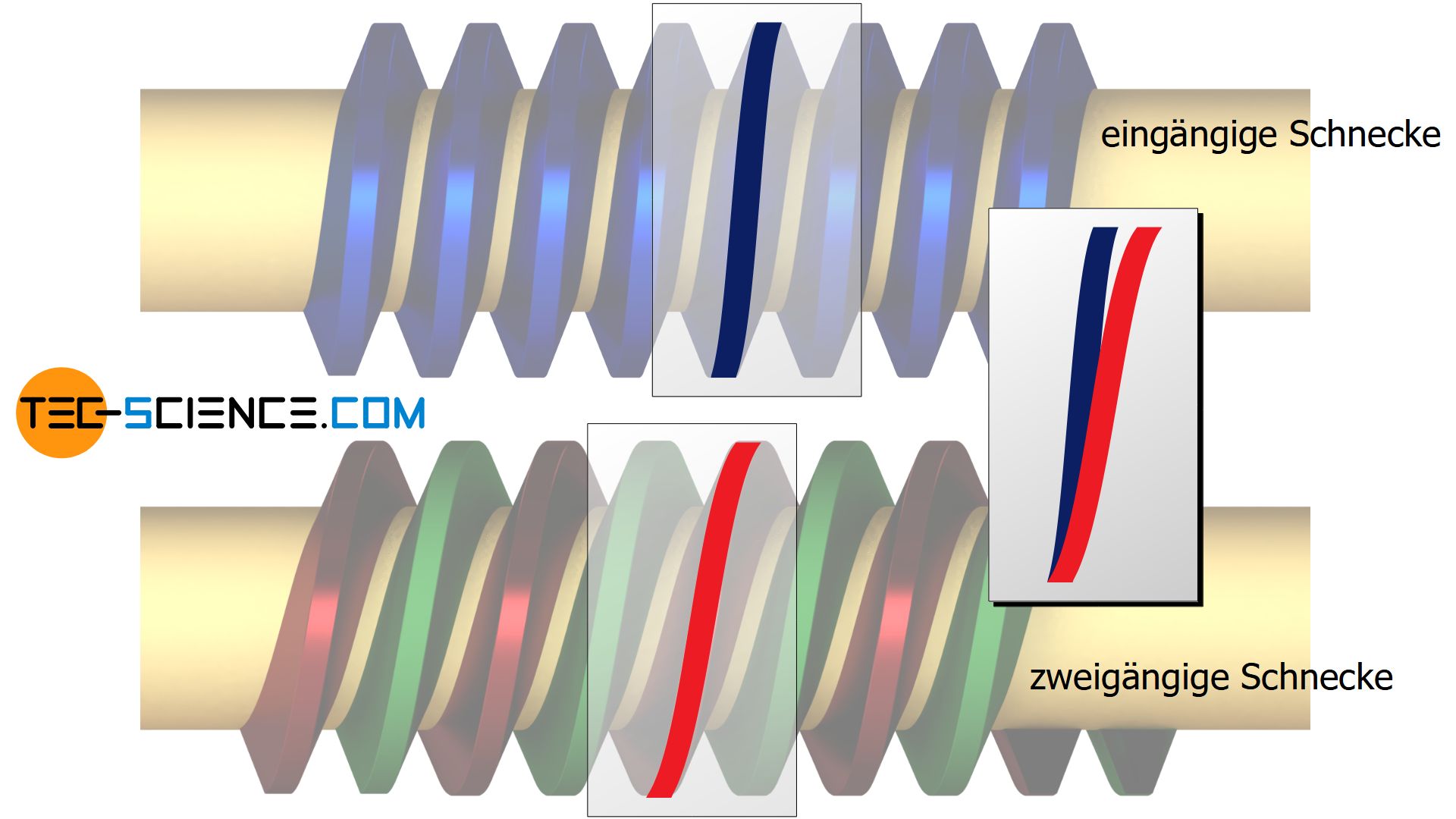
Die „Zähnezahl“ wird bei einer Schnecke als Gangzahl bezeichnet. Dementsprechend spricht man von eingängigen, zweigängigen oder mehrgängigen Schnecken. In der Regel werden vorwiegend eingängige Schnecken hergestellt, in Sonderfällen kann die Gangzahl aber auch bis zu vier betragen.
Bei Schnecken handelt es sich im Prinzip um spiralförmig aufgewickelte „Zähne“, die sich in das Schneckenrad schrauben und dieses somit Antreiben!
Übersetzungsverhältnis
Da die Gangzahl letztlich das Äquivalent zur Zähnezahl von Stirnrädern darstellt, entspricht die zur Ermittlung des Übersetzungsverhältnisses \(i\) zugrunde zu legende Zähnezahl der Gangzahl der Schnecke:
\begin{align}
\label{uebersetzungsverhaeltnis}
&\boxed{ i = \frac{z_{\text{Schneckenrad}}} {z_{\text{Schnecke}}} } ~~~ \text{mit } z_{\text{Schnecke}} = 1 … 4 ~~~\text{je nach Gangzahl}\\[5px]
\end{align}
Dass die Gangzahl der Schnecke sich wie die Zähnezahl eines Zahnrades verhält, wird auch direkt anhand der unteren Animation des eingängigen Schneckengetriebes ersichtlich. So schiebt sich bei einer Umdrehung der Schnecke der Gewindegang gerade um eine Position weiter. Das Schneckenrad wird somit um einen Zahn weiterbewegt. Mit einem Zahnrad verglichen, verhält sich die Schnecke in diesem Fall also tatsächlich so, als hätte diese am Umfang nur einen Zahn.
Bei einer Umdrehung einer zweigängigen Schnecke hingegen, würden zwei Gewindegänge jeweils ein Zahn weiterschieben. Insgesamt würden dann zwei Zähne des Schneckenrades weiterbewegt worden sein. Die zweigängige Schnecke verhielte sich dann wie ein zweizahniges Zahnrad.
Die folgende Animation zeigt hierzu den Vergleich zwischen einer zweigängigen Schnecke und der eingängigen Schnecke. Beachte, dass das von der zweigängigen Schnecke angetriebene Schneckenrad doppelt so schnell rotiert wie das Schneckenrad der eingängigen Schnecke (geringeres Übersetzungsverhältnis).
Aufgrund der im Allgemeinen sehr niedrigen Gangzahl der Schnecke (für gewöhnlich eingängig!) und der vergleichsweise großen Zähnezahl des Schneckenrades ist das Übersetzungsverhältnis von Schneckengetrieben entsprechend sehr hoch. Mit Schneckengetriebe lassen sich somit platzsparend sehr hohe Übersetzungsverhältnisse von größer 100 realisieren!
Da in einem Schneckengetriebe im Allgemeinen mehrere Gewindeabschnitte des Schneckenrades gleichzeitig im Eingriff sind, ist die Belastbarkeit solcher Getriebe sehr hoch, d.h. es können sehr große Leistungen übertragen werden. Zudem sind Schneckengetriebe aufgrund des kontinuierlichen Ineinandergleitens der Flanken zwischen Schnecke und Schneckenrad und der benötigten Schmierung bzw. Kühlung sehr geräuscharm (im folgenden Abschnitt mehr hierzu).
Schneckengetriebe sind sehr platzsparend und eigenen sich für das Übertragen großer Leistungen bei hohen Übersetzungsverhältnissen!
Kraftübertragung
Die Kraftübertragung erfolgt bei Schneckengetriebe fast ausschließlich über Gleitvorgänge an den Flanken, d.h. die Flanken gleiten wie bei einer Schraubenverbindung aufeinander ab. Schnecken stellen letztlich ein Sonderfall von Schraubenräder dar. Im Gegensatz zu Schraubenräder, die einen punktförmigen Flankenkontakt erzeugen, liegt bei Schnecken allerdings ein linienförmiger Flankenkontakt vor. Hieraus resultiert der Vorteil des Übertragens größerer Leistungen bei höheren Übersetzungsverhältnissen.
Anders als das Stirnradgetriebe und Kegelradgetriebe, die zu den Wälzgetrieben zählen (reines Abwälzen der gedachten Wälzkörper ohne relative Gleitbewegung an den Berührpunkten), gehört das Schneckengetriebe deshalb zur Gruppe der Schraubwälzgetriebe. Aufgrund der Gleit- bzw. Reibungsvorgänge an den Flanken ist der Wirkungsgrad von Schraubwälzgetriebe geringer als der von Wälzgetrieben. Durch die Reibvorgänge an den Flanken und damit verbundene Wärmeentwicklung muss das Schneckengetriebe bei großen Leistungen zusätzlich zur Schmierung gekühlt werden.
Schneckenarten
Je nach Form der Schnecke können Schneckengetriebe unterschiedlich eingeteilt werden.
Zylinderschnecken
Ist die äußere Form der Schnecke als Zylinder ausgeführt, so spricht man von einer Zylinderschnecke. Bildet dabei das Schneckenrad im Querschnitt dieses Zylinderprofil am Umfang ab, so spricht man vom Globoidschneckenrad. Aufgrund der relativ einfachen Herstellung einer Zylinderschnecke, wird diese Variante vorzugsweise verwendet (Zylinderschneckengetriebe).
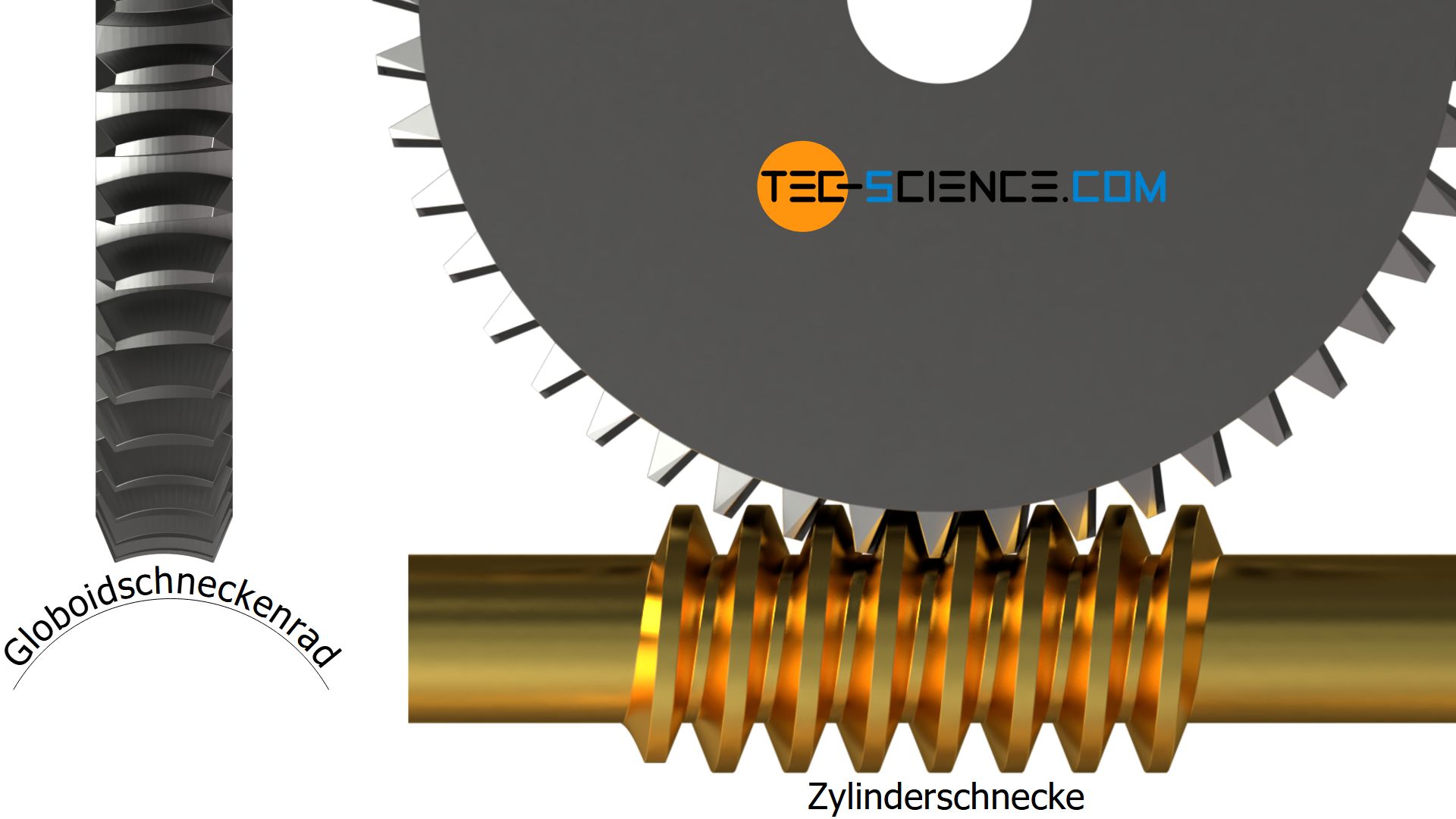
Zylinderschnecken sind einfach zu produzieren und werden aus kostengründen bevorzugt verwendet!
Globoidschnecken
In einer abgeänderten Variante beschreibt die äußere Form der Schnecke einen Bogen, die das zum Globoidschneckenrad teilweise“einhüllt“. Man spricht dann von einer Globoidschnecke.
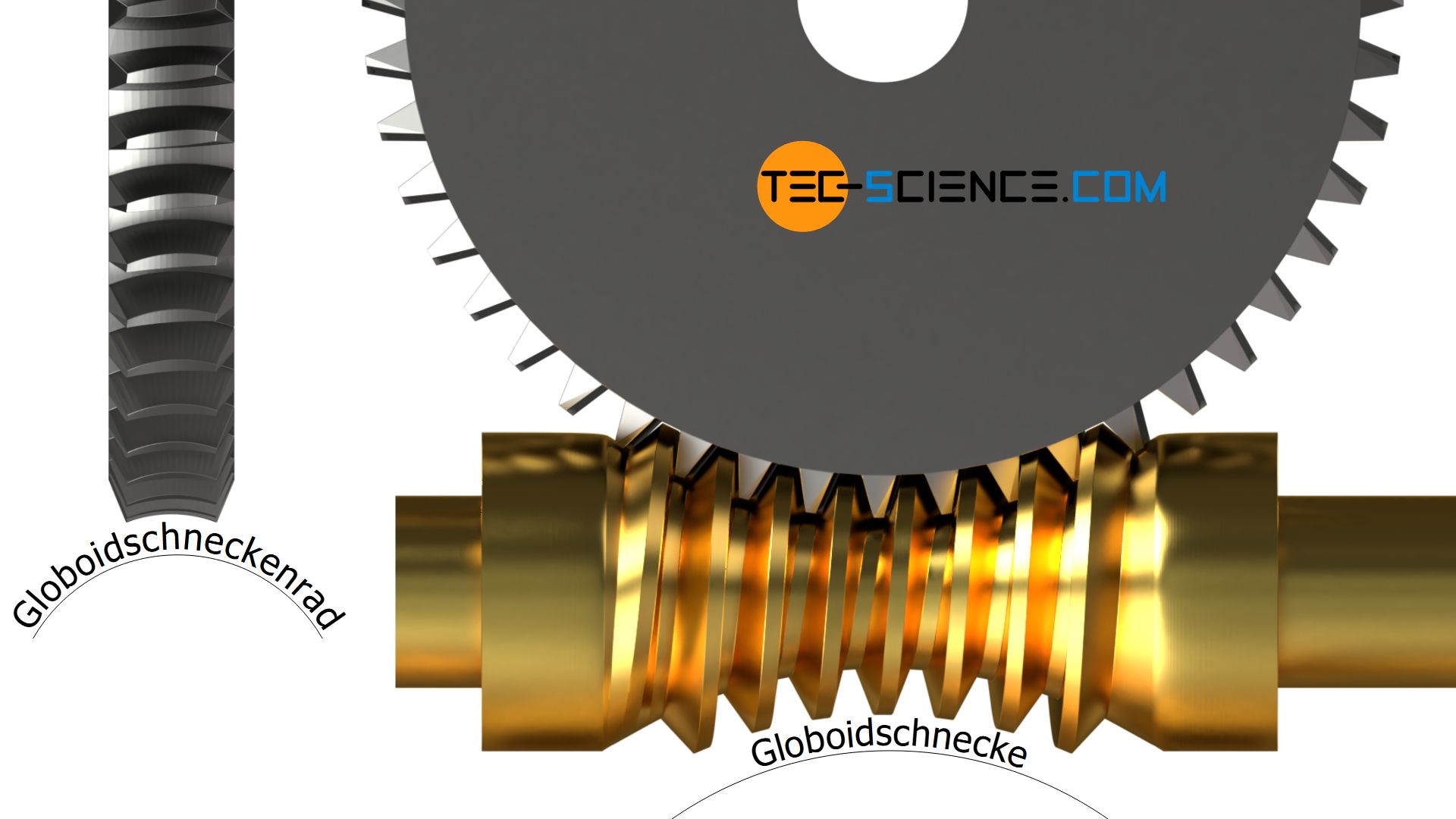
Im Vergleich zur Zylinderschnecke wird bei Globoidschnecken durch das „Umwickeln“ des Schneckenrades erreicht, dass mehrere Gewindeabschnitte bei der Kraftübertragung beteiligt sind. Globoidschnecken können somit höhere Leistungen übertragen als Zylinderschnecken.
Die Herstellung einer Globoidschnecke ist im Vergleich zur Zylinderschnecke relativ aufwendig und deshalb teuer. Solche Globoidschneckengetriebe werden deshalb weniger verwendet.
Mit Globoidschnecken können höhere Leistungen übertragen werden; sie sind aufgrund der aufwendigen Fertigung jedoch relativ teuer!
In Sonderfällen kann die Globoidschnecke auch mit einem einfachen schrägverzahnten Stirnrad gepaart werden. Dies erfordert jedoch eine spezielle Anpassung der Schnecke an das Stirnrad, was die Herstellung entsprechend teuer macht. Vorteil einer solchen Variante ist jedoch der geringere konstruktive Aufwand, da die radiale Positionierung des Schneckenrades bei der Paarung mit einem einfachen schrägverzahnten Stirnrad eine größere Toleranz zulässt als dies bei einem Globoidschneckenrad der Fall ist.

Selbsthemmung
Getriebe werden als selbsthemmend bezeichnet, wenn die Drehmomentübertragung nur in eine Richtung stattfinden kann. Nur über den Getriebeeingang (Antrieb) lässt sich das Getriebe in Bewegung versetzen; über den Getriebeausgang (Abtrieb) lässt sich das Getriebe hingegen nicht bewegen. An- und Abtrieb sind somit fest vorgegeben.
Schneckengetriebe sind aufgrund ihrer speziellen Funktionsweise häufig selbsthemmend. Ursache der Selbsthemmung liegt in der Schraubwirkung der Schnecke bei geringen Steigungswinkel begründet. So kann die Schnecke durch ihre schraubenförmigen Flankenbewegung zwar das Schneckenrad antreiben, umgekehrt kann meist jedoch keine Drehwirkung erzeugt werden. Die Anpresskraft der Schneckenradflanken an die Gewindeflanken der Schnecke ist so groß und der Steigungswinkel so gering, dass die hierdurch entstehende Reibungskraft eine Drehwirkung unterbindet. Aus diesem Grund erfolgt bei selbsthemmenden Schneckengetriebe der Antrieb grundsätzlich über die Schnecke und der Abtrieb über das Schneckenrad.
Selbsthemmende Schneckengetriebe lassen sich nur über die Schnecke in Bewegung setzen!
Beachte, dass eingängige Schnecken im Allgemeinen einen geringeren Steigungswinkel aufweisen als mehrgängige Schnecken. Eingängige Schnecken winden sich also stärker und sind deshalb häufiger selbsthemmend als mehrgängige. Dies bedeutet umgekehrt, dass mit mehrgängigen Schnecken eine Selbsthemmung gezielt verhindert werden kann (sofern gewünscht).
Arten der Selbsthemmung
Selbsthemmende Schneckengetriebe werden bspw. bei Hebevorrichtungen verwendet. Somit kann verhindert werden, dass sich die Hebevorrichtung bei abgeschaltetem Motor von selbst wieder nach unten bewegt (statisch selbsthemmend). Auf eine zusätzliche Feststellbremse kann dann verzichtet werden, sofern die Selbsthemmung groß genug ist und sich nicht durch etwaige Erschütterungen von selbst lösen kann. Sollte ein solches Lösen doch der Fall sein, dann ist dabei häufig ein „Rattern“ des Getriebes zu verzeichnen.
Je nach Anwendungsfall muss zusätzlich sichergestellt sein, dass das Getriebe auch dann von selbst zum Stillstand kommt, wenn der Motor während der Absenkphase der Hebevorrichtung abgeschaltet wird (dynamisch selbsthemmend bzw. selbstbremsend).
Wie das obere Beispiel zeigt, muss bei der Selbsthemmung folglich zwischen zwei Arten unterschieden werden:
- Selbsthemmung (statische Selbsthemmung)
„Selbsthemmung im Ruhezustand“ (Haftreibung wird nicht überwunden) - Selbstbremsung (dynamischer Selbsthemmung)
„Selbstbremsung aus dem Betriebszustand“ (Gleitreibung wirkt bremsend)
Von (statischer) Selbsthemmung spricht man, wenn sich ein zur Ruhe gekommenes und erschütterungsfreies Getriebe nicht von selbst über das Schneckenrad in Gang bringen lässt!
Durch Vibrationen oder Erschütterungen kann diese statische Selbsthemmung jedoch aufgehoben werden und sich das Getriebe bei abtriebsseitiger Last in Gang setzen.
Bei der Selbstbremsung (dynamische Selbsthemmung) kommt das abgeschaltete Getriebe aus dem laufenden Zustand bei abtriebsseitig vorhandener Last (z.B. Absenken einer Hebebühne) nach kurzer Zeit zum Stillstand.
Selbsthemmung und Wirkungsgrad
Selbsthemmung ist grundsätzlich immer mit Reibung verbunden, ohne die es ansonsten keine Selbsthemmung gäbe. Selbsthemmende Getriebe weisen somit immer einen niedrigeren Wirkungsgrad auf als vergleichbare nicht-selbsthemmende Getriebe. Überlicherweise liegen die Wirkungsgrade bei selbsthemmenden Schneckengetrieben unter 50 %. Oberhalb 50 % sind Schneckengetriebe häufig nicht-selbsthemmend, wobei die Grenze stets fließend verläuft.
Ist eine Selbsthemmung nicht erforderlich, dann liegt der Fokus meist auf einem möglichst hohen Wirkungsgrad. Wirkungsgrade von deutlich über 90 % sind auch bei Schneckengetrieben durchaus möglich, jedoch grundsätzlich ohne Selbsthemmung. Wird aus Gründen der Wirtschaftlichkeit ein hoher Getriebewirkungsgrad bei gleichzeitiger „Selbsthemmung“ gefordert, dann muss das Getriebe mit einer Feststellbremse ausgerüstet werden.
Wie bereits erläutert, haben die einzelnen Gänge einer mehrgängigen Schnecke einen größeren Steigungswinkel und somit eine geringere Tendenz zur Selbsthemmung, da die Reibungskräfte durch die verminderte „Keilwirkung“ geringer sind. Dies erhöht den Wirkungsgrad!
Mehrgängige Schnecken haben höhere Wirkungsgrade und eine geringere Tendenz zur Selbsthemmung!
Nachlaufvorrichtungen
Problematisch kann die Selbsthemmung dann werden, wenn mit dem Schneckenrad großen Massen bewegt werden. Wird der Antrieb der Schnecke dann plötzlich abgeschaltet, so ist das Schneckenrad aufgrund der Trägheit der angetriebenen Masse jedoch noch weiterhin versucht sich zu bewegen. Da die Schnecke bei einer totalen Selbsthemmung aber keine Drehbewegung zulässt bzw. bei dynamischer Selbsthemmung sich nur schwer bewegen lässt, kommt es zu enormen Flankenkräften bis hin zum Bruch der Schnecke.
In solchen Fällen kann die Schnecke also nicht abrupt zum Stillstand gebracht werden sondern muss beim Abschalten etwas nachlaufen. Bestimmte Schmierstoffe können dabei der Schnecke helfen ein solches Auslaufen zu ermöglichen. Eventuell müssen auch bestimmte Nachlaufvorrichtungen installiert werden, die das Getriebe langsamen zum Stillstand bringen.
Werden mit Schneckengetrieben große Massen bewegt, dann muss sichergestellt werden, dass das Getriebe nach dem Abschalten nicht sofort zum Stillstand kommt!
")

")


